arXiv pre-print View it on Github Demo
An RGB and Event Aligned Latent Manifold for Cross-Modal Perception
Vincenzo Polizzi1, David B. Lindell2, Jonathan Kelly1
1University of Toronto, Robotics Institute
2University of Toronto, Department of Computer Science
Abstract
Interactive Demo
Try REALM on your own data. Upload an RGB image and an event voxel grid (see github repo on how to obtain it).
Qualitative Results on Downstream Tasks
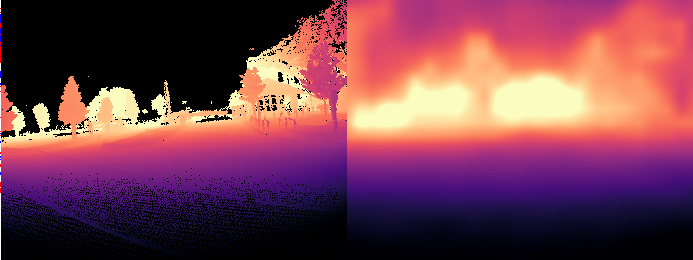
Monocular Depth Estimation
REALM preserves dense scene structures using a simple linear projector evaluated on MVSEC sequences, showcasing strong robustness in challenging nighttime conditions where frame-based sensing degrades.

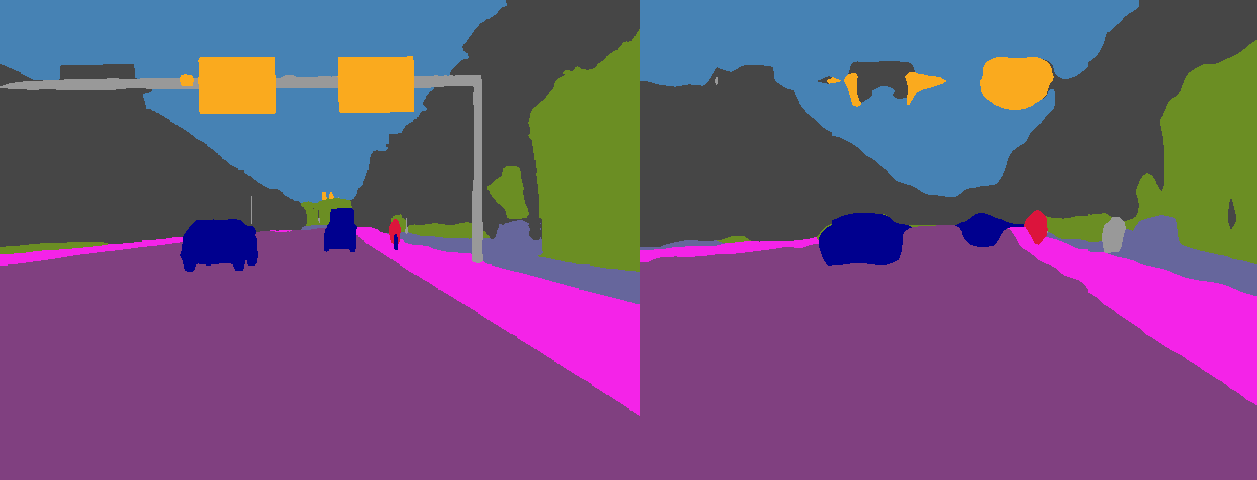
Dense Semantic Segmentation
REALM effectively identifies key classes (e.g., road, vehicles, pedestrians) on the DSEC driving dataset using a frozen backbone and a single linear head, inheriting strong scene understanding directly from the RGB teacher.

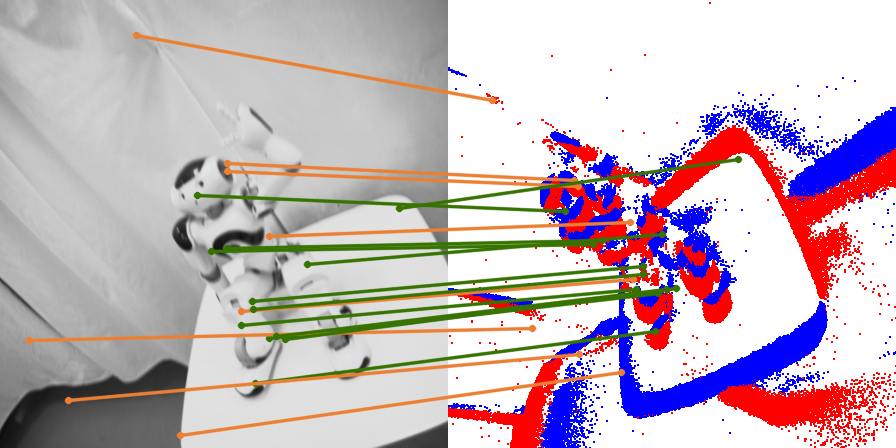
Cross-Modal Feature Matching
Zero-shot cross-modal (RGB-Event) and intra-modal (Event-Event) matching leveraging the frozen MASt3R decoder. REALM operates natively in a geometrically consistent latent space to produce robust correspondences under wide viewpoints.
In green are the correct matches in orange the incorrect ones (given by RANSAC).
Cite this work
@misc{polizzi_2026_realm,
title={REALM: An RGB and Event Aligned Latent Manifold for Cross-Modal Perception},
author={Vincenzo Polizzi and David B. Lindell and Jonathan Kelly},
year={2026},
eprint={},
archivePrefix={arXiv},
primaryClass={cs.CV},
url={https://arxiv.org/abs/},
}