Safe Mission-Level Path Planning for Exploration of Lunar Shadowed Regions by a Solar-Powered Rover
Olivier Lamarre, Shantanu Malhotra, Jonathan Kelly
Article accepted in the 2024 IEEE Aerospace Conference
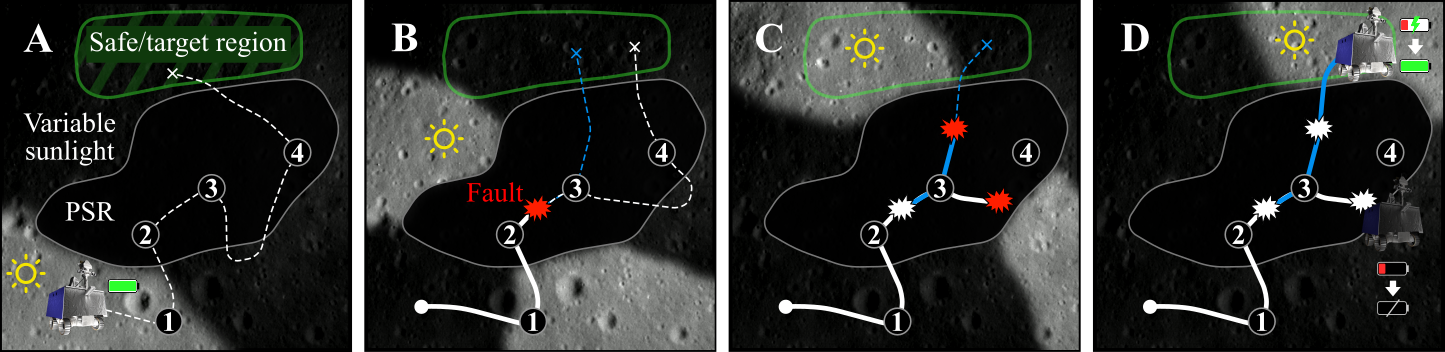
Overview
Supplementary material
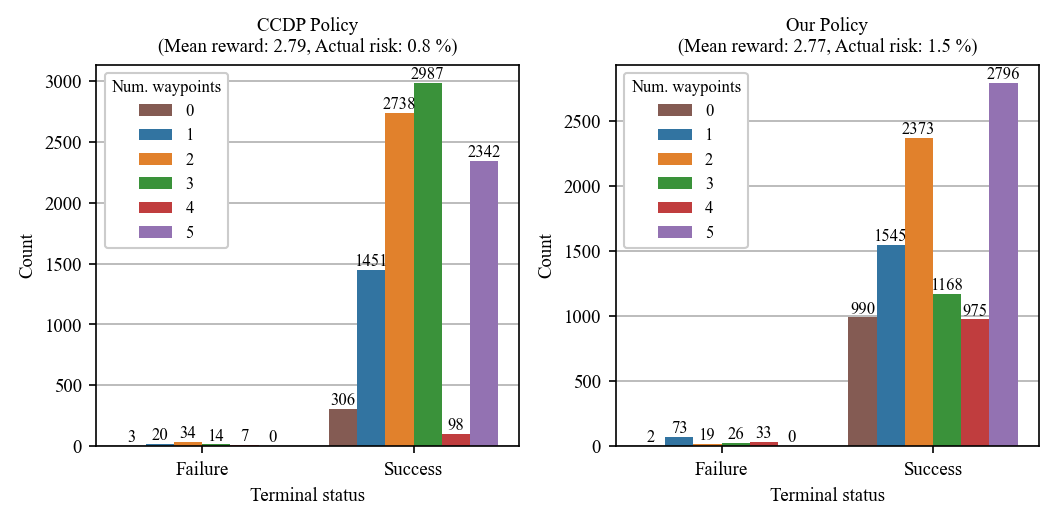
Distribution of Monte-Carlo trials between our approach and the CCDP algorithm
Traverse trials for the medium-scale traverse generated with our proposed algorithm
5 waypoints visited, no fault, safe region reached:
5 waypoints visited, 1 fault, safe region reached:
3 waypoints visited, 2 faults, safe region reached:
1 waypoint visited, 4 faults, safe region reached:
1 waypoint visited, 2 faults, mission failure:
Traverse trials near the LCROSS impact site
2 waypoints visited, six faults, safe region reached:
1 waypoint visited, two faults, safe region reached:
2 waypoints visited, six faults, mission failure:
Citation
@inproceedings{2024_Lamarre_Safe,
address = {Big Sky, Montana, USA},
author = {Olivier Lamarre and Shantanu Malhotra and Jonathan Kelly},
booktitle = {Proceedings of the IEEE Aerospace Conference},
month = {March},
doi = {10.1109/AERO58975.2024.10521136},
pages = {1--14},
title = {Safe Mission-Level Path Planning for Exploration of Lunar Shadowed Regions by a Solar-Powered Rover},
year = {2024}
}