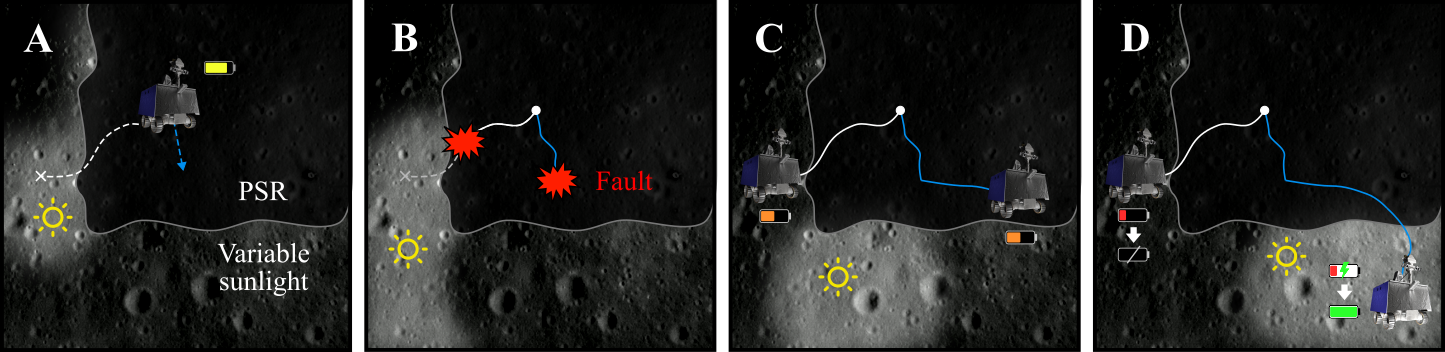
Recovery Policies for Safe Exploration of Lunar Permanently Shadowed Regions by a Solar-Powered Rover
arXiv preprint gplanetary_nav on Github
Olivier Lamarre, Shantanu Malhotra, Jonathan Kelly
Article published in the Acta Astronautica journal
Overview
Supplementary material: animation of recovery drives from the LCROSS crash site
The manuscript shows snapshots of simulation trials departing at different times from a specific location near the LCROSS crash site. The following shows complete animations of these traverses:
Departure from timestamp t0 (UNIX timestamp 1882218800s, August 23 2029 22:33:20 UTC):
Departure from timestamp t1 (UNIX timestamp 1882272800s, August 24 2029 13:33:20 UTC):
Departure from timestamp t2 (UNIX timestamp 1882377200s, August 25 2029 18:33:20 UTC):
Departure from timestamp t4 (UNIX timestamp 1882514000s, August 27 2029 08:33:20 UTC):
Citation
@article{lamarre_recovery_2023,
title = {Recovery policies for safe exploration of lunar permanently shadowed regions by a solar-powered rover},
volume = {213},
issn = {0094-5765},
doi = {10.1016/j.actaastro.2023.09.028},
urldate = {2023-11-18},
journal = {Acta Astronautica},
author = {Lamarre, Olivier and Malhotra, Shantanu and Kelly, Jonathan},
month = dec,
year = {2023},
pages = {708--724},
}